


Section: New Results
Physical modelling and simulation
Modal analysis for haptic manipulation of deformable models
Participants : Zhaoguang Wang, Georges Dumont [contact] .
Real-time interaction between designer and deformable mock-up in VR (Virtual Reality) environment is a natural and promising manner to evaluate designing feasibility. Using finite element method (FEM) for solving this issue leads to high fidelity simulation but to simulation rates that do not meet the requirements (1000Hz) of real time haptic applications. We have proposed a two-stage method based on linear modal analysis. In this method, different modal subspaces, related to use scenarios, are pre-computed offline. These data are then combined online with respect to a simulation division scheme to obtain real time deformations of the parts with respect to the modal response. Two main features are developed in the method. First, we apply an adapted meshing method during the pre-computation process. This method allows to automatically switch between different modal subspaces depending on the interaction region. Second, we divide the real time deformation computation into two separate modules by extracting sub-matrixes from the pre-computed modal matrixes. This separates the haptic simulation loop from the whole deformation computation an thus preserves the haptic response. This work was presented in WINVR 2011 conference [31] is accepted for publication [8] and was the subject of the PhD Thesis of Zhaoguang Wang, that was defended in june 2011 [3] .
Real-time mechanical simulation of brittle fracture
Participants : Loeïz Glondu, Georges Dumont [contact] , Maud Marchal [contact] .
Simulating brittle fracture of stiff bodies is now commonplace in computer graphics. However, simulating the deformations undergone by the bodies in a realistic way remains computationaly expensive. Thus, physically-based simulation of brittle fracture in real-time is still challenging for interactive applications. We are currently working on a new physically-based approach for simulating realistic brittle fracture in real-time. Our method is composed of two main original parts: (1) a fracture initiation model based on modal analysis and a new contact force model and (2) a fracture propagation model based on a novel physically-based algorithm (Figure 2 ). First results of this method have been published in [32] .
|
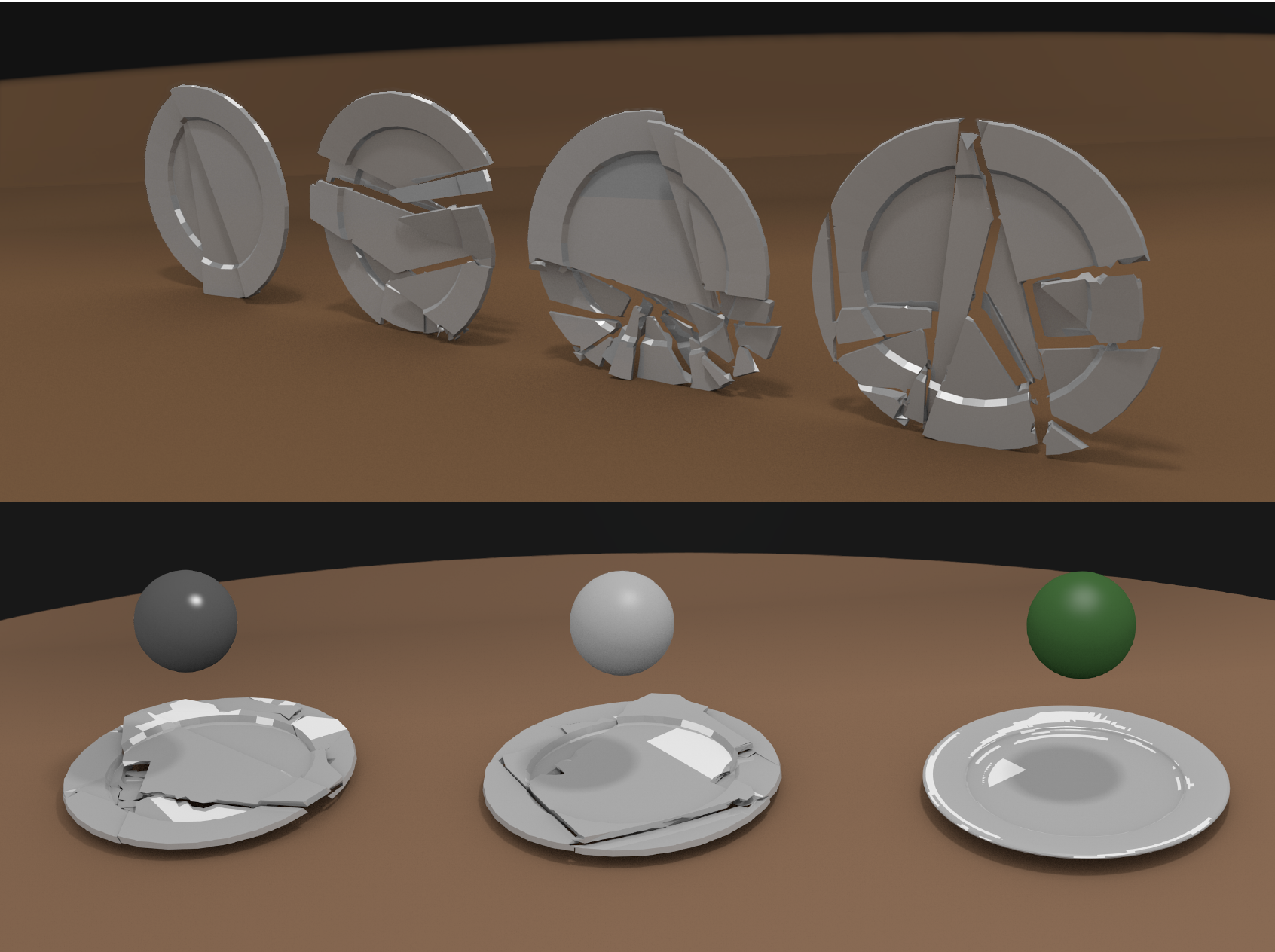

Adding physical properties to objects within a virtual world can not generally be handled in real-time during a simulation. For that reason, it is still difficult nowadays to physically simulate fragments of fractured objects or parts of teared/cut objects. We have proposed a method for handling the real-time physical simulations of arbitrary objects that are represented by their surface mesh. Our method is based on a pre-computed shape database in which physical data are stored for a wide variety of objects. When a query object needs to be physically simulated in the virtual world, a similarity search is performed inside the database and the associated physical data are extracted. Our approach proposes to compare three different similarity search methods that fit with our real-time needs. Our results show that our approach has a great potential for the physical simulation of arbitrary objects in interactive applications. These results have been published in the Eurographics International Workshop on Virtual Reality Interaction and Physical Simulation (Vriphys) [21] .
Collision detection in large scale environments with High Performance Computing
Participants : Quentin Avril, Valérie Gouranton [contact] , Bruno Arnaldi.
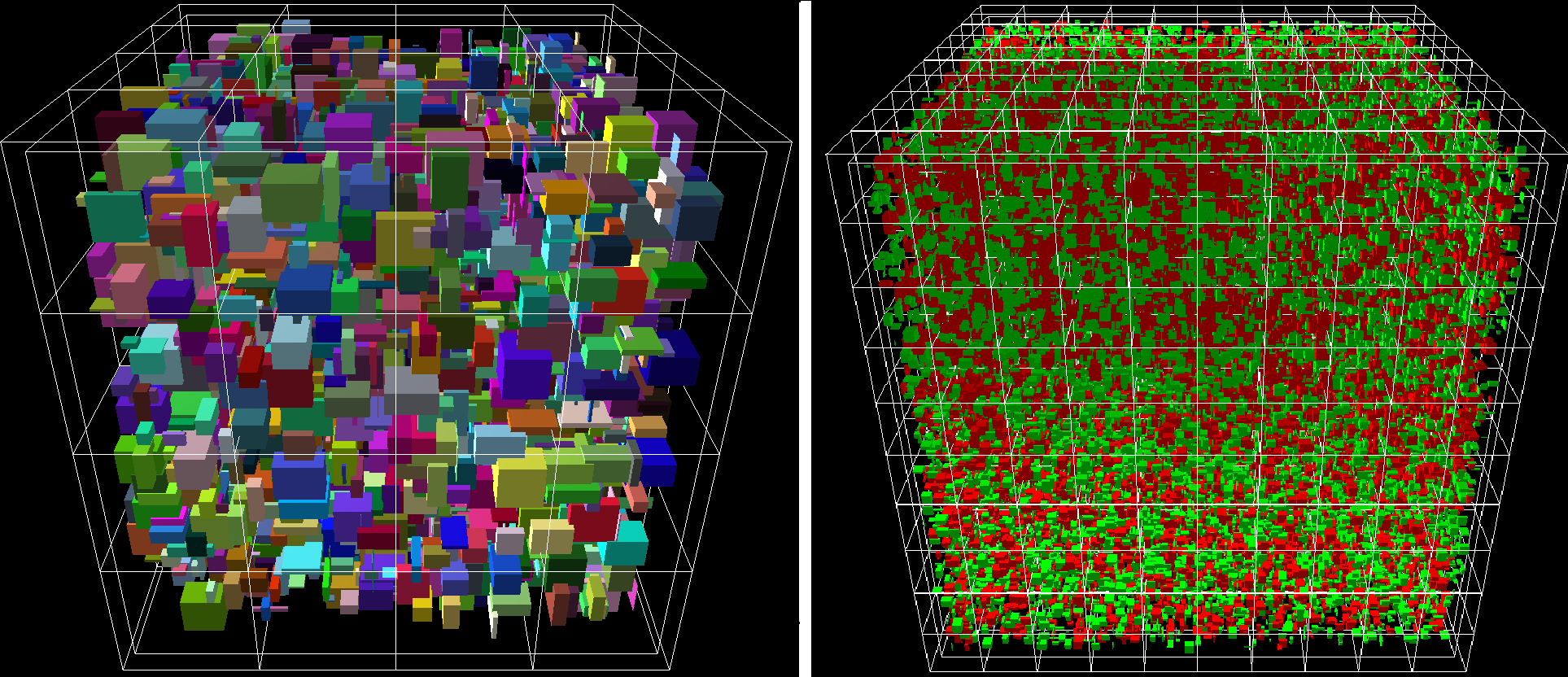
Virtual reality environments are becoming increasingly large and complex and real-time interaction level is becoming difficult to stably insure. Indeed, because of their complexity, detailed geometry and specific physical properties, these large scale environments create a critical computational bottleneck on physical algorithms. Our work focused on the first step of the physical process : the collision detection. These algorithms can sometimes have a quadratic complexity. Solving and simplifying the collision detection problem is integral to alleviating this bottleneck. Hardware architectures have undergone extensive changes in the last few years that have opened new ways to relieve this computational bottleneck. Multiple processor cores offer the ability to execute algorithms in parallel on one single processor. At the same time, graphics cards have gone from being a simple graphical display device to a supercomputer. These supercomputers now enjoy attention from a specialized community dealing solely with physical simulation. To perform large scale simulations and remain generic on the runtime architecture, we proposed unified and adaptive mapping models between collision detection algorithms and the runtime architecture using multi-core and multi-GPU architectures. We have developed innovative and effective solutions to significantly reduce the computation time in large scale environments while ensuring the stability and reproducibility of results (cf. Figure 3 ). We proposed a new pipeline of collision detection with a granularity of parallelism on multicore processors or multi-GPU platforms[11] . It enables simultaneous execution of different stages of the pipeline and a parallel internal to each of these steps. This was the subject of the PhD thesis of Quentin Avril [1] .
|
Assessment of inverse dynamics method for muscle activity analysis
Participants : Georges Dumont [contact] , Charles Pontonnier.
The use of virtual reality tools for ergonomics applications is a very important challenge. In order to improve the design of workstations, an estimation of the muscle forces involved in the work tasks has to be done. Several methods can lead to these muscle forces. In this study, we try to assess the level of confidence for results obtained with an inverse dynamics method from real captured work tasks. The chosen tasks are meat cutting tasks, well known to be highly correlated to musculoskeletal troubles appearance in the slaughter industry.
The experimental protocol consists in recording three main data during meat cutting tasks, and analyse their variation when some of the workstation design parameters are changing [26] .
-
External (cutting)force data : for this purpose, a 3D instrumented knife has been designed in order to record the force applied by the subject during the task;
-
Motion Capture data : for this purpose, we use a motion capture system with active markers (Visualeyez II, Phoenix Technologies, Canada);
-
EMG data : several muscle activities are recorded using electromyographic electrodes, in order to compare these activities to the ones obtained from the inverse dynamics method.
Then the motion is replayed in the AnyBody modeling system (AnyBody, Aalborg, Denmark) in order to obtain muscle forces generated during the motion. A trend comparison is then done [27] , comparing recorded and computed muscle activations. Results show that most of the computed activations are qualitatively close from the recorded ones (similar shapes and peaks), but quantitative comparison leads to major differences between recorded and computed activations (the trend followed by the recorded activations in regard of a workstation design parameter, such as the table height, is not obtained with the computed activations). We currently explore those results to see if the fact that co-contraction of single joints muscles is badly estimated by classical inverse dynamics method can be a reason of this issue. We also work on the co-contration simulation in order to improve the results [28] .
This work has been done in collaboration with the Center for Sensory-motor Interaction (SMI, Aalborg University, Aalborg, Denmark), particularly Mark de Zee (Associate Professor) and Pascal Madeleine (Professor). Charles Pontonnier spent a 9 months post-doctoral fellowship at SMI from December 2010 to August 2011.